




















 – GOTY Contender, however Play It Elsewhere for Now – TouchArcade")




")





We deployed 100 reinforcement studying (RL)-controlled vehicles into rush-hour freeway visitors to easy congestion and cut back gasoline consumption for everybody. Our aim is to sort out “stop-and-go” waves, these irritating slowdowns and speedups that normally don’t have any clear trigger however result in congestion and vital power waste. To coach environment friendly flow-smoothing controllers, we constructed quick, data-driven simulations that RL brokers work together with, studying to maximise power effectivity whereas sustaining throughput and working safely round human drivers.
Total, a small proportion of well-controlled autonomous automobiles (AVs) is sufficient to considerably enhance visitors circulation and gasoline effectivity for all drivers on the street. Furthermore, the educated controllers are designed to be deployable on most trendy automobiles, working in a decentralized method and counting on normal radar sensors. In our newest paper, we discover the challenges of deploying RL controllers on a large-scale, from simulation to the sphere, throughout this 100-car experiment.
The challenges of phantom jams

A stop-and-go wave shifting backwards by way of freeway visitors.
In the event you drive, you’ve certainly skilled the frustration of stop-and-go waves, these seemingly inexplicable visitors slowdowns that seem out of nowhere after which abruptly clear up. These waves are sometimes brought on by small fluctuations in our driving conduct that get amplified by way of the circulation of visitors. We naturally modify our velocity primarily based on the car in entrance of us. If the hole opens, we velocity as much as sustain. In the event that they brake, we additionally decelerate. However resulting from our nonzero response time, we’d brake only a bit more durable than the car in entrance. The subsequent driver behind us does the identical, and this retains amplifying. Over time, what began as an insignificant slowdown turns right into a full cease additional again in visitors. These waves transfer backward by way of the visitors stream, resulting in vital drops in power effectivity resulting from frequent accelerations, accompanied by elevated CO2 emissions and accident threat.
And this isn’t an remoted phenomenon! These waves are ubiquitous on busy roads when the visitors density exceeds a essential threshold. So how can we tackle this downside? Conventional approaches like ramp metering and variable velocity limits try and handle visitors circulation, however they usually require pricey infrastructure and centralized coordination. A extra scalable method is to make use of AVs, which might dynamically modify their driving conduct in real-time. Nonetheless, merely inserting AVs amongst human drivers isn’t sufficient: they need to additionally drive in a wiser method that makes visitors higher for everybody, which is the place RL is available in.
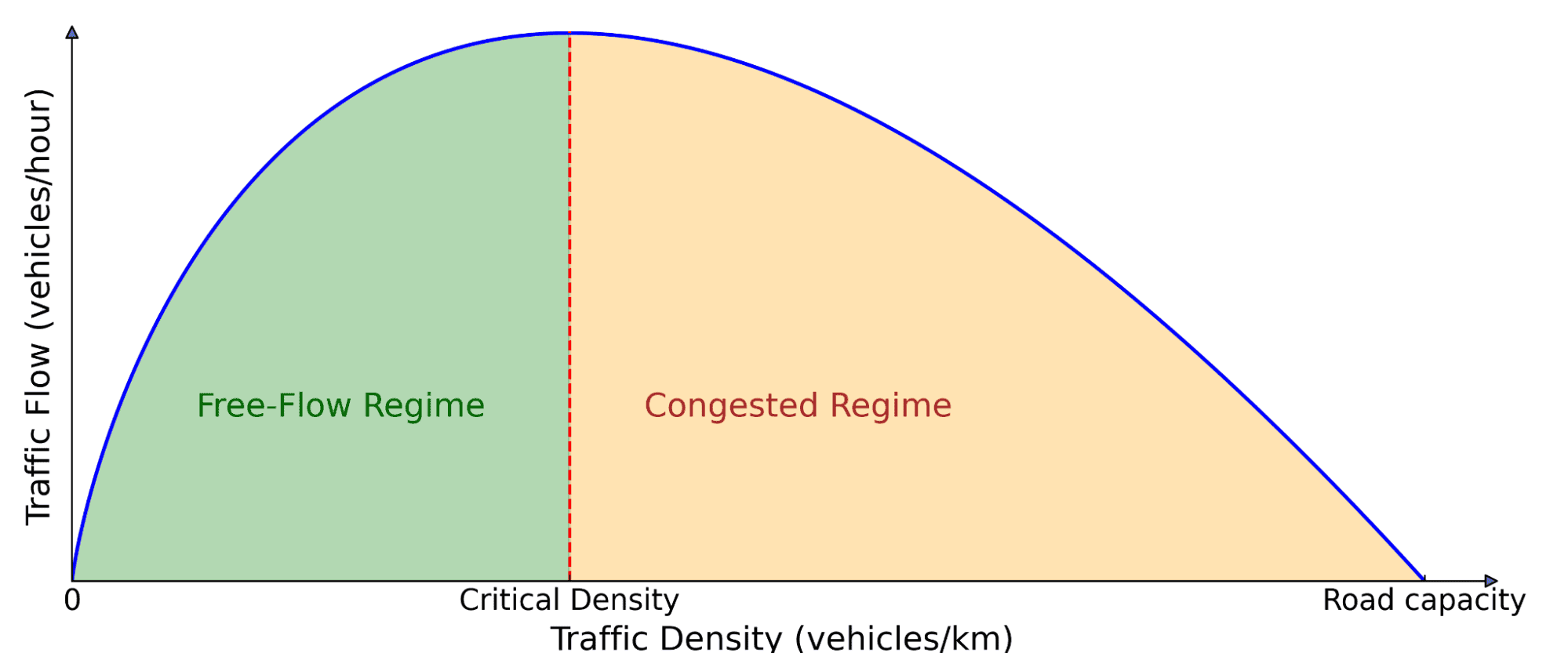
Basic diagram of visitors circulation. The variety of vehicles on the street (density) impacts how a lot visitors is shifting ahead (circulation). At low density, including extra vehicles will increase circulation as a result of extra automobiles can move by way of. However past a essential threshold, vehicles begin blocking one another, resulting in congestion, the place including extra vehicles really slows down general motion.
Reinforcement studying for wave-smoothing AVs
RL is a strong management method the place an agent learns to maximise a reward sign by way of interactions with an setting. The agent collects expertise by way of trial and error, learns from its errors, and improves over time. In our case, the setting is a mixed-autonomy visitors state of affairs, the place AVs be taught driving methods to dampen stop-and-go waves and cut back gasoline consumption for each themselves and close by human-driven automobiles.
Coaching these RL brokers requires quick simulations with sensible visitors dynamics that may replicate freeway stop-and-go conduct. To realize this, we leveraged experimental knowledge collected on Interstate 24 (I-24) close to Nashville, Tennessee, and used it to construct simulations the place automobiles replay freeway trajectories, creating unstable visitors that AVs driving behind them be taught to easy out.
Simulation replaying a freeway trajectory that reveals a number of stop-and-go waves.
We designed the AVs with deployment in thoughts, making certain that they’ll function utilizing solely primary sensor details about themselves and the car in entrance. The observations encompass the AV’s velocity, the velocity of the main car, and the area hole between them. Given these inputs, the RL agent then prescribes both an instantaneous acceleration or a desired velocity for the AV. The important thing benefit of utilizing solely these native measurements is that the RL controllers will be deployed on most trendy automobiles in a decentralized method, with out requiring further infrastructure.
Reward design
Essentially the most difficult half is designing a reward operate that, when maximized, aligns with the completely different targets that we want the AVs to realize:
- Wave smoothing: Scale back stop-and-go oscillations.
- Power effectivity: Decrease gasoline consumption for all automobiles, not simply AVs.
- Security: Guarantee cheap following distances and keep away from abrupt braking.
- Driving consolation: Keep away from aggressive accelerations and decelerations.
- Adherence to human driving norms: Guarantee a “regular” driving conduct that doesn’t make surrounding drivers uncomfortable.
Balancing these targets collectively is tough, as appropriate coefficients for every time period have to be discovered. As an example, if minimizing gasoline consumption dominates the reward, RL AVs be taught to come back to a cease in the midst of the freeway as a result of that’s power optimum. To forestall this, we launched dynamic minimal and most hole thresholds to make sure secure and cheap conduct whereas optimizing gasoline effectivity. We additionally penalized the gasoline consumption of human-driven automobiles behind the AV to discourage it from studying a egocentric conduct that optimizes power financial savings for the AV on the expense of surrounding visitors. Total, we goal to strike a steadiness between power financial savings and having an affordable and secure driving conduct.
Simulation outcomes
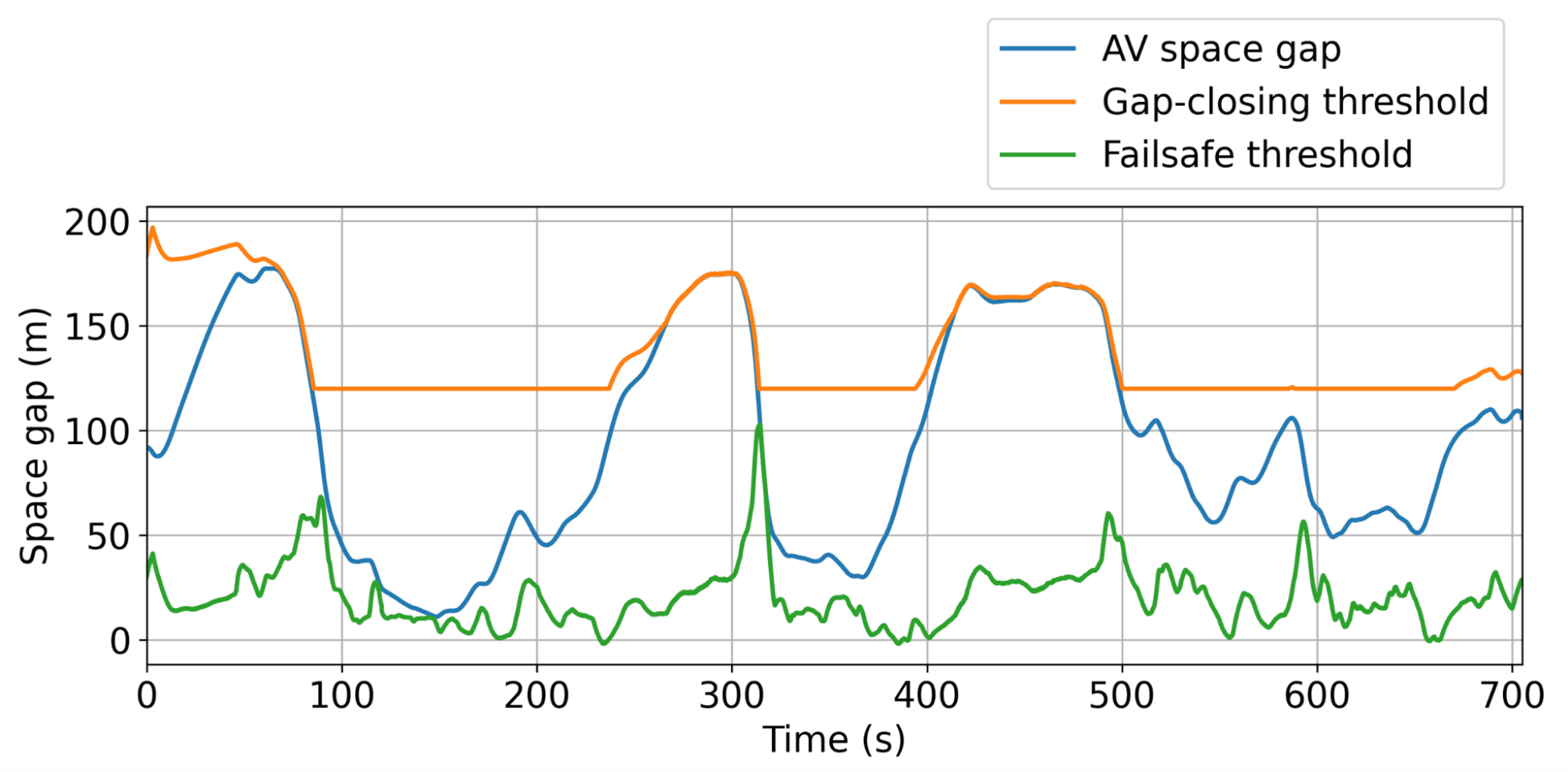
Illustration of the dynamic minimal and most hole thresholds, inside which the AV can function freely to easy visitors as effectively as attainable.
The standard conduct realized by the AVs is to take care of barely bigger gaps than human drivers, permitting them to soak up upcoming, presumably abrupt, visitors slowdowns extra successfully. In simulation, this method resulted in vital gasoline financial savings of as much as 20% throughout all street customers in probably the most congested situations, with fewer than 5% of AVs on the street. And these AVs don’t should be particular automobiles! They’ll merely be normal client vehicles outfitted with a wise adaptive cruise management (ACC), which is what we examined at scale.
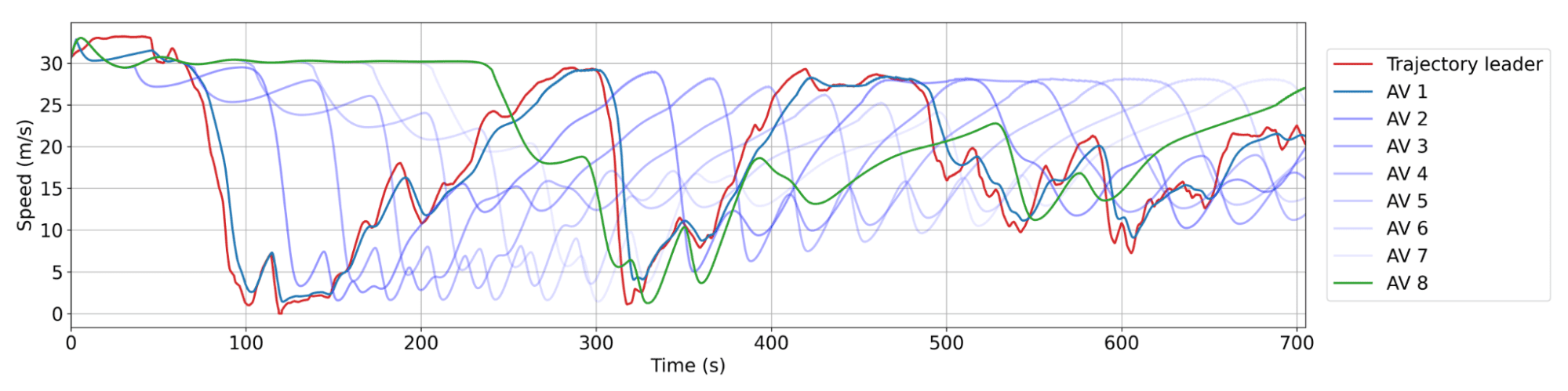
Smoothing conduct of RL AVs. Crimson: a human trajectory from the dataset. Blue: successive AVs within the platoon, the place AV 1 is the closest behind the human trajectory. There may be usually between 20 and 25 human automobiles between AVs. Every AV doesn’t decelerate as a lot or speed up as quick as its chief, resulting in reducing wave amplitude over time and thus power financial savings.
100 AV area take a look at: deploying RL at scale


Our 100 vehicles parked at our operational middle through the experiment week.
Given the promising simulation outcomes, the pure subsequent step was to bridge the hole from simulation to the freeway. We took the educated RL controllers and deployed them on 100 automobiles on the I-24 throughout peak visitors hours over a number of days. This huge-scale experiment, which we referred to as the MegaVanderTest, is the most important mixed-autonomy traffic-smoothing experiment ever performed.
Earlier than deploying RL controllers within the area, we educated and evaluated them extensively in simulation and validated them on the {hardware}. Total, the steps in direction of deployment concerned:
- Coaching in data-driven simulations: We used freeway visitors knowledge from I-24 to create a coaching setting with sensible wave dynamics, then validate the educated agent’s efficiency and robustness in quite a lot of new visitors situations.
- Deployment on {hardware}: After being validated in robotics software program, the educated controller is uploaded onto the automobile and is ready to management the set velocity of the car. We function by way of the car’s on-board cruise management, which acts as a lower-level security controller.
- Modular management framework: One key problem through the take a look at was not gaining access to the main car data sensors. To beat this, the RL controller was built-in right into a hierarchical system, the MegaController, which mixes a velocity planner information that accounts for downstream visitors situations, with the RL controller as the ultimate choice maker.
- Validation on {hardware}: The RL brokers had been designed to function in an setting the place most automobiles had been human-driven, requiring strong insurance policies that adapt to unpredictable conduct. We confirm this by driving the RL-controlled automobiles on the street underneath cautious human supervision, making modifications to the management primarily based on suggestions.
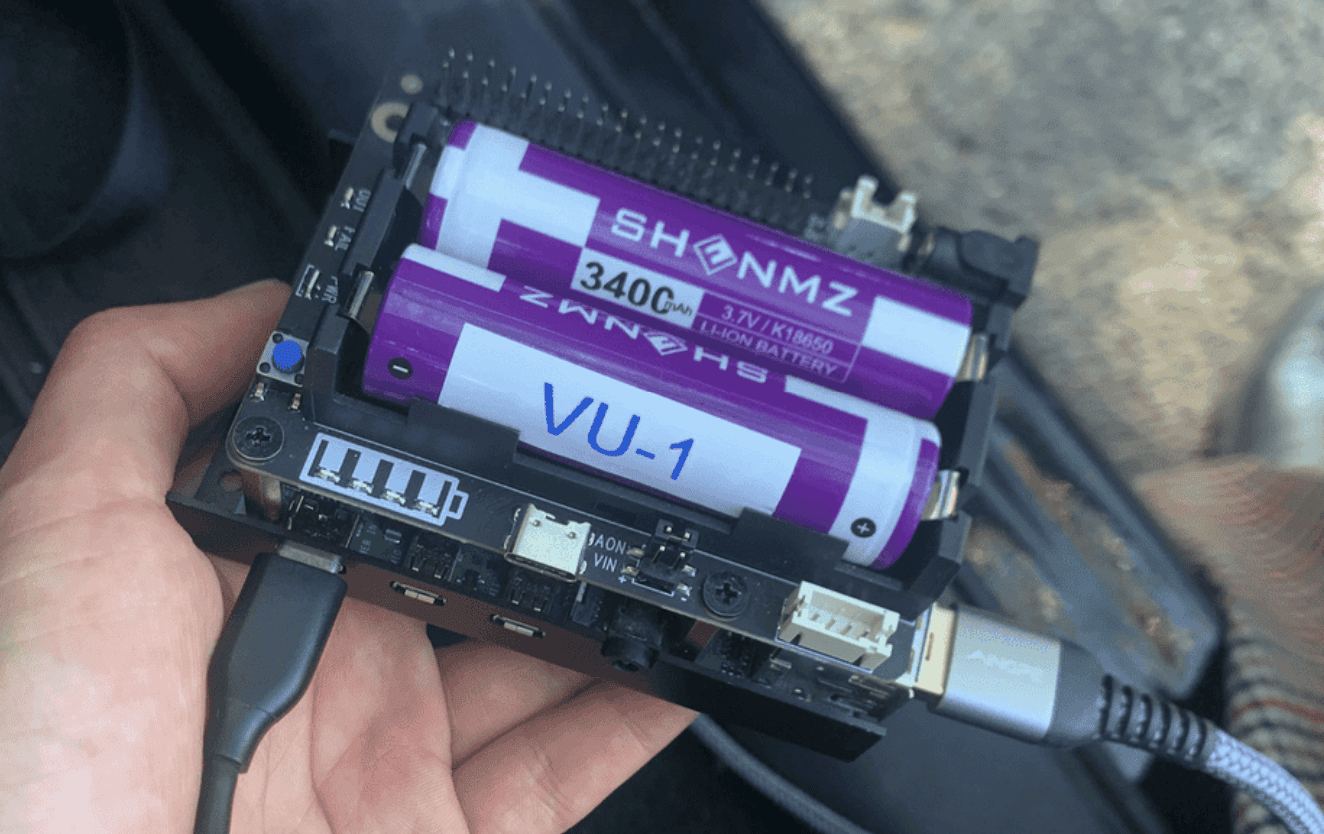
Every of the 100 vehicles is linked to a Raspberry Pi, on which the RL controller (a small neural community) is deployed.

The RL controller straight controls the onboard adaptive cruise management (ACC) system, setting its velocity and desired following distance.
As soon as validated, the RL controllers had been deployed on 100 vehicles and pushed on I-24 throughout morning rush hour. Surrounding visitors was unaware of the experiment, making certain unbiased driver conduct. Information was collected through the experiment from dozens of overhead cameras positioned alongside the freeway, which led to the extraction of thousands and thousands of particular person car trajectories by way of a pc imaginative and prescient pipeline. Metrics computed on these trajectories point out a development of decreased gasoline consumption round AVs, as anticipated from simulation outcomes and former smaller validation deployments. As an example, we will observe that the nearer persons are driving behind our AVs, the much less gasoline they seem to eat on common (which is calculated utilizing a calibrated power mannequin):
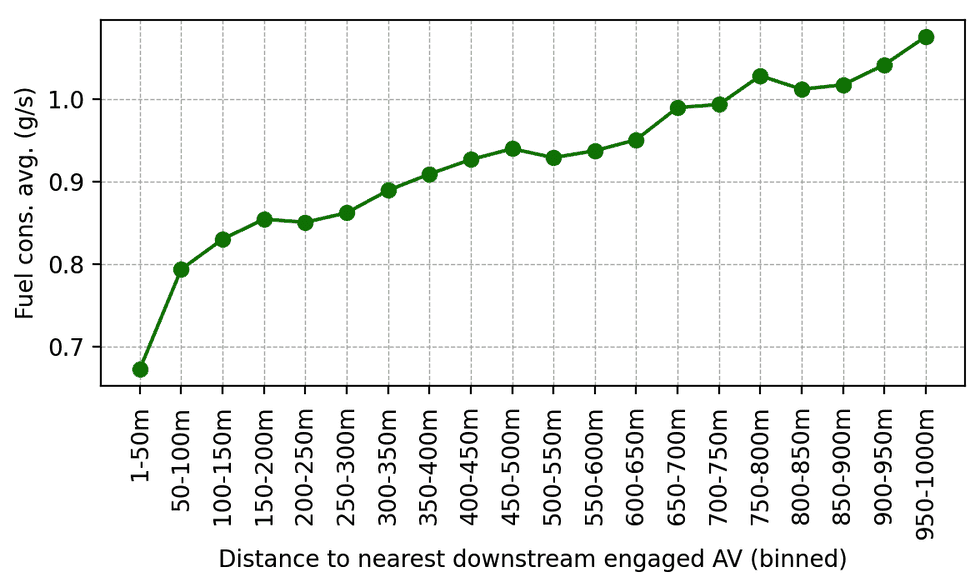
Common gasoline consumption as a operate of distance behind the closest engaged RL-controlled AV within the downstream visitors. As human drivers get additional away behind AVs, their common gasoline consumption will increase.
One other strategy to measure the impression is to measure the variance of the speeds and accelerations: the decrease the variance, the much less amplitude the waves ought to have, which is what we observe from the sphere take a look at knowledge. Total, though getting exact measurements from a considerable amount of digicam video knowledge is sophisticated, we observe a development of 15 to twenty% of power financial savings round our managed vehicles.
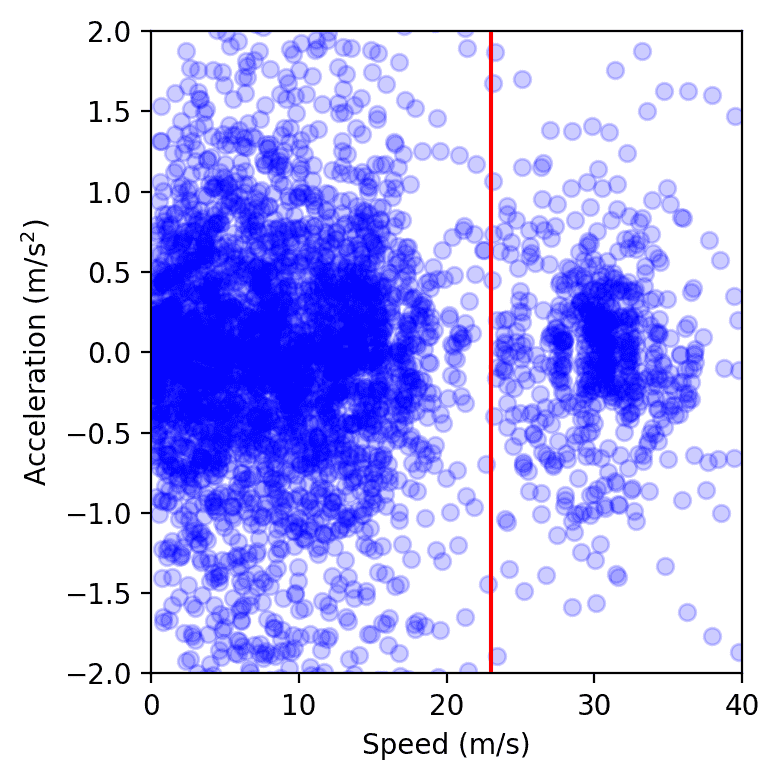
Information factors from all automobiles on the freeway over a single day of the experiment, plotted in speed-acceleration area. The cluster to the left of the crimson line represents congestion, whereas the one on the correct corresponds to free circulation. We observe that the congestion cluster is smaller when AVs are current, as measured by computing the realm of a gentle convex envelope or by becoming a Gaussian kernel.
Remaining ideas
The 100-car area operational take a look at was decentralized, with no specific cooperation or communication between AVs, reflective of present autonomy deployment, and bringing us one step nearer to smoother, extra energy-efficient highways. But, there may be nonetheless huge potential for enchancment. Scaling up simulations to be quicker and extra correct with higher human-driving fashions is essential for bridging the simulation-to-reality hole. Equipping AVs with further visitors knowledge, whether or not by way of superior sensors or centralized planning, might additional enhance the efficiency of the controllers. As an example, whereas multi-agent RL is promising for enhancing cooperative management methods, it stays an open query how enabling specific communication between AVs over 5G networks might additional enhance stability and additional mitigate stop-and-go waves. Crucially, our controllers combine seamlessly with current adaptive cruise management (ACC) techniques, making area deployment possible at scale. The extra automobiles outfitted with sensible traffic-smoothing management, the less waves we’ll see on our roads, which means much less air pollution and gasoline financial savings for everybody!
Many contributors took half in making the MegaVanderTest occur! The total checklist is obtainable on the CIRCLES mission web page, together with extra particulars in regards to the mission.
Learn extra: [paper]






{kind=link}